


- LGH-IRW04型 工業(yè)機器人操作調(diào)整工技能鑒定平臺
- LGH-JR05Z型 工業(yè)機器人視覺裝配實訓(xùn)平臺
- LGH-JR605Z型 工業(yè)機器人上下料技能實訓(xùn)平臺
- LGH-JR12C型 工業(yè)機器人電氣系統(tǒng)拆裝實訓(xùn)平臺
- LGH-LS01型 工業(yè)機器人理實一體化教學(xué)系統(tǒng)
- LGH-MES40型 工業(yè)4.0生產(chǎn)線實訓(xùn)系統(tǒng)
- LGH-DK01型 工業(yè)機器人雕刻實訓(xùn)平臺
- LGH-HJ12型 工業(yè)機器人焊接實訓(xùn)平臺
- LGH-MP12型 工業(yè)機器人磨拋實訓(xùn)平臺
- LGL-PT06型 工業(yè)機器人噴涂實操工作站
- LGL-CZ06型 工業(yè)機器人機械拆裝及電氣拆裝平臺
- LGL-MD06型 工業(yè)機器人碼垛實操工作站
- LGL-DM06型 工業(yè)機器人打磨去毛刺實操工作站
- LGL-HJ06型 工業(yè)機器人焊接實操工作站
- LGL-IR03型 工業(yè)機器人綜合實訓(xùn)平臺
- LGL-ZS01型 綜合設(shè)備工業(yè)機器人工作站
- LG-CY403型 高防護工業(yè)機器人
- LG-CY420型 沖壓工業(yè)機器人
- LG-CY415型 四軸工業(yè)機器人
- LG-CY410A型 沖壓工業(yè)機器人
- LG-HJ605型 焊接工業(yè)機器人
- LG-DM630型 打磨工業(yè)機器人
- LG-DM612型 打磨工業(yè)機器人
- LG-ZN6150型 工業(yè)機器人
- LG-ZN680型 工業(yè)機器人
- LG-ZN650L型 工業(yè)機器人
- LG-ZN630型 工業(yè)機器人
- LG-ZN620L型 工業(yè)機器人
- LG-ZN612型 工業(yè)機器人
- LG-ZN605型 工業(yè)機器人
- LG-ZN603型 小型六軸工業(yè)機器人
- LGL-406型 SCARA工業(yè)機器人
- LGL-608H型 六軸工業(yè)機器人
- LGL-608型 工業(yè)機器人
- LGL-607/607L型 工業(yè)機器人
- LGL-604型 工業(yè)機器人
- LGL-620型 六軸工業(yè)機器人
- LG-SX5110型 碼垛工業(yè)機器人(5軸)
- LG-SX616型 工業(yè)機器人(機床高防護版)
- LG-SX610型 六軸工業(yè)機器人
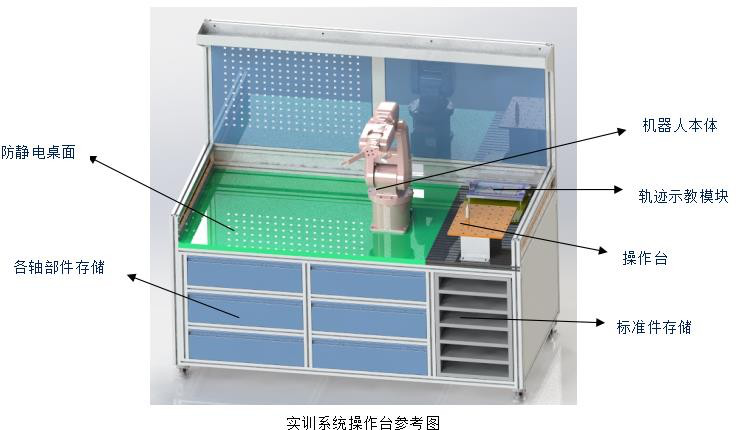
LG-RCZ01型 工業(yè)機器人拆裝實訓(xùn)工作站
一、機械拆裝平臺
1、機械平臺主要用于機器人本體的拆裝實訓(xùn)。
2、平臺分為兩部分:一部分為機器人本體拆裝實訓(xùn)區(qū)域,一部分為拆裝好定位及精度調(diào)試區(qū)域。
3、由鋁型材搭建,尺寸約:長 1.2 米,寬 1 米。
4、配置碼垛及軌跡兩套實訓(xùn)模塊,用于拆裝后的定位及、精度調(diào)試。
二、機器人本體參數(shù)指標(biāo)
機器人裝調(diào)維修實訓(xùn)系統(tǒng)")
輕量型機器人,適用于做繼續(xù)拆裝實訓(xùn)。外形小巧、重量輕,也能適合用于組裝小型單元機器人,能夠高速、高精度的完成上下料、分揀、裝配等各項工作。同時所有機器人線纜內(nèi)置,能夠在狹小的空間靈活的進行作業(yè),安裝方式可以選擇地面安裝、掛裝、倒裝。
技術(shù)參數(shù)
| 工業(yè)機器人 | LGL-607 | |
| 手腕負載 | 額定 5 kg | |
| *大 6 kg | ||
| *大工作半徑 | 780mm | |
| 自由度 | 6 | |
| 關(guān)節(jié)速度 | J1 | 370°/s |
| J2 | 370°/s | |
| J3 | 430°/s | |
| J4 | 300°/s | |
| J5 | 460°/s | |
| J6 | 600°/s | |
| 關(guān)節(jié)范圍 | J1 | ±170° |
| J2 | ±110° | |
| J3 | "+40°/- 220° | |
| J4 | ±185° | |
| J5 | ±120° | |
| J6 | ±360° | |
| 瞬間容許*大轉(zhuǎn)矩 | J5 | 35Nm |
| J6 | 24Nm | |
| 重量 | 30kg | |
| 重復(fù)定位精度 | ±0.05mm | |
| 工作溫度 | 0-40℃ | |
三、電氣拆裝實訓(xùn)平臺
1、電控拆裝平臺主要用于 1-6 軸的驅(qū)動安裝,以及控制系統(tǒng)的安裝,并在平臺表面上接線,形成一個開放式電柜。
2、規(guī)格尺寸:約長 1.2 米,寬 0.8 米,高 1.6 米。
3、材質(zhì):鋁型材結(jié)構(gòu)。

四、工業(yè)機器人控制系統(tǒng)
機器人裝調(diào)維修實訓(xùn)系統(tǒng)")
1、控制系統(tǒng)要求:
工業(yè)機器人控制系統(tǒng)采用國際流行的開放式軟硬件平臺。配以自主研發(fā)的專用多軸運動控制卡、數(shù)據(jù)采集卡及機器人專用端子和安全接口;模塊化的軟件設(shè)計,針對不同的本體結(jié)構(gòu)、應(yīng)用行業(yè)、功能等。可實現(xiàn)垂直多關(guān)節(jié)串聯(lián)機器人、垂直多關(guān)節(jié)平行四邊形機器人、垂直多關(guān)節(jié) L 形手腕機器人、垂直多關(guān)節(jié)球形手腕機器人、極坐標(biāo)機器人、多軸專用機械等多類機器人的控制;應(yīng)用在搬運、焊接、噴涂、碼垛、切割、拋光打磨等領(lǐng)域。標(biāo)準(zhǔn)的計算機總線可擴展現(xiàn)場總線、機器視覺系統(tǒng)等。
2、系統(tǒng)技術(shù)要求:
(1)優(yōu)化結(jié)構(gòu)算法,適應(yīng)多種結(jié)構(gòu)形式的本體控制
(2)模塊化功能設(shè)置,適應(yīng)多種應(yīng)用場合
(3)8 軸控制,可實現(xiàn)外部軸(行走軸、變位機)的控制
(4)改進性機算機總線連接方式,確保可靠性和實用性
(5)開放式結(jié)構(gòu),同步國際水平、方便功能擴展
(6)軟件 PLC 功能,方便邏輯控制
(7)工藝功能,簡化編程操作簡便
(8)適配 EtherCAT 伺服
(9)安全模塊,確保機器人安全生產(chǎn)
五、機器人控制器及示教盒技術(shù)參數(shù):
1、控制部分構(gòu)造:開放式
2、電源:3 相 AC380V(+10%~-15%), 50/60 Hz
3、相對濕度: *大 90%
4、輸入輸出信號: 輸入/64, 輸出/64
5、驅(qū)動單元: 交流伺服
6、加減速控制: 軟件伺服控制
7、接口: RS-232
8、周邊溫度:0℃~+45℃(運轉(zhuǎn)時), -10℃~+60℃(運輸保管時)
9、控制柜功能說明
(1)具有獨立示教器, 坐標(biāo)系選擇: 關(guān)節(jié)、 直角、 工具及用戶坐標(biāo)系
(2)示教點修改: 插入, 刪除或修改
(3)微動操作: 可實現(xiàn)
(4)軌跡確認(rèn): 單步前進, 后退, 連續(xù)行進
(5)速度調(diào)整: 在機器人工作中和停止中均可微調(diào) 快捷功能: 直接打開功能、 多窗口
10、主要功能:
示教方法: 示教再現(xiàn)
驅(qū)動方式: 交流伺服驅(qū)動
11、控制軸數(shù)量: 6~8
12、位置控制方式: PTP/CP
13、速度控制: TCP 恒速控制
14、坐標(biāo)系統(tǒng): 軸坐標(biāo), 直角坐標(biāo), 用戶坐標(biāo), 工具坐標(biāo)動作
15、插補功能: 線性插補, 圓弧插補
16、手動操作速度: 4 段可調(diào)
六、諧波減速器性能測試系統(tǒng)
1、諧波檢測軟件:
(1)通過軟件進行檢測減速機運行壽命檢測,提供檢測時軟件界面截圖。
(2)主要功能:此軟件配和控制箱進行減速機壽命測試。
(3)可檢運行速度,提供符合此功能的軟件界面截圖。
(4)可檢測運行脈沖數(shù)量,提供符合此功能的軟件界面截圖。
(5)安裝方式可選擇:側(cè)面負載測試,水平負責(zé)測試,提供符合此功能的軟件界面截
(5)旋轉(zhuǎn)方式選擇:正轉(zhuǎn),反轉(zhuǎn),正反轉(zhuǎn)
(7)運行狀態(tài)監(jiān)測顯示,提供符合此功能的軟件界面截圖。
(8)可顯示檢測總運行時間且能清除運行總時間。
(9)可檢測編號和型號。
(10)可顯示馬達當(dāng)前脈沖位置,提供符合此功能的軟件界面截圖。
(11)可急停所有伺服馬達。
(12)保存設(shè)定信息內(nèi)容到控制器
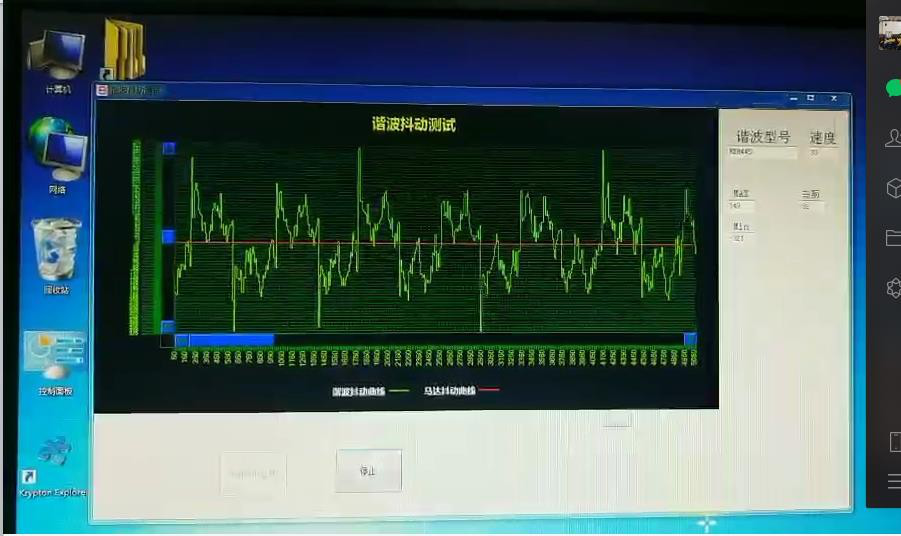
2、諧波抖動檢測軟件
(1)用多摩川 23 位編碼器對諧波輸出端進行位置讀取,關(guān)節(jié)帶 6kg 負載做圓周運動,中間經(jīng)過數(shù)據(jù)處理獲得在每 100ms 采樣間隔中的關(guān)節(jié)速度, 提供操作演示視頻截圖。(采樣時間:100ms 時間誤差:7us-60us 采樣數(shù)據(jù):23 位編碼器讀取位置 負載:6kg 所做運動:圓周運動)
(2)主要功能:此軟件配和控制箱進行減速機抖動測試。并且記錄數(shù)據(jù)內(nèi)容生產(chǎn)儲存檔案。
(3)位置信息數(shù)據(jù)顯示,可以進行拉動查看,提供符合此功能的軟件界面截圖。
(4)時間信息數(shù)據(jù)顯示,可以進行拉動查看,提供符合此功能的軟件界面截圖。
(5)可設(shè)置諧波型號及運行速度,提供符合此功能的軟件界面截圖。
(6)當(dāng)前位置信息顯示,*大位置,*小位置信息顯示。
(7)波形圖顯示區(qū)域,可以按住鼠標(biāo)左鍵拖動鼠標(biāo)進行放大縮小顯示,提供符合此功能的軟件界面截圖。
3、系統(tǒng)工控機參數(shù)要求(用戶自配)
(1)結(jié)構(gòu):機架式.
(2)內(nèi)部硬盤位數(shù):4
(3)硬盤大小:128G
(4)硬盤類型:SSD;混合硬盤
(5)電源:220V
(6)電 壓:非冗余
(7)內(nèi)存類型:Non-ECC
(8)*大內(nèi)存容量:32GB
(9)內(nèi)存大小:4G,其他
(10)支持 CPU 個數(shù):1 顆,
(11)處理器描述:酷睿 i3
(12)CPU 類 型 :intel (13)CPU 頻率(MHz):2.2GHz
(13)主板芯片組:英特爾
(14)擴展槽:PCI, PCI-E
(15)工作溫度:-10℃~60℃
(16)系統(tǒng)支持:windows7,linux
4、定制驅(qū)動裝置,提供驅(qū)動裝置設(shè)計原圖;驅(qū)動電機功率不小于2000W。
提供諧波減速器性能測試系統(tǒng)操作視頻截圖。
七、電氣拆裝工具清單
| 序號 | 名 稱 | 型 號/規(guī) 格 | 單位 | 數(shù)量 | |||||
| 1 | 電氣拆裝工具 | 多功能雙層電工工具盒 | 330x160x165 | 只 | 1 | ||||
| 2 | 焊錫絲 | φ0.8mm Sn 55/45 | 只 | 1 | |||||
| 3 | 剪刀 | 2#(180mm) | 只 | 1 | |||||
| 4 | 尖嘴鉗 | 6# | 只 | 1 | |||||
| 5 | 剝線鉗 | 6.5 寸 | 只 | 1 | |||||
| 6 | 斜口鉗 | 2412E | 只 | 1 | |||||
| 7 | 萬用表 | F17B | 只 | 1 | |||||
| 8 | 9 件套公制球頭內(nèi)六角扳手 | M1.5-M10 | 套 | 1 | |||||
| 9 | 電工膠布 | 18*10 | 只 | 1 | |||||
| 10 | 十字槽小盤頭組合螺釘 | GB/T9074.5 M4*10 | 只 | 1 | |||||
| 11 | 電烙鐵 | 50W 帶 洛 鐵 架 | 只 | 1 | |||||
| 12 | 一字螺絲刀 | 6" 6*100) | 只 | 1 | |||||
| 13 | 一字螺絲刀 | 3*100 | 只 | 1 | |||||
| 14 | 十字螺絲刀 | 6*100 | 只 | 1 | |||||
| 15 | 十字螺絲刀 | 3*100 | 只 | 1 | |||||
| 16 | 可調(diào)式熱風(fēng)槍 | 常規(guī) | 只 | 1 | |||||
| 17 | B 系列連續(xù)端子壓接鉗 | 常規(guī) | 只 | 1 | |||||
| 18 | B 系列連續(xù)端子壓接鉗 | 常規(guī) | 只 | 1 | |||||
| 19 | 退針器 | 常規(guī) | 只 | 1 | |||||
八、機械配套工具清單
| 序號 | 名 稱 | 規(guī) 格 | 單位 | 數(shù)量 | |
| 1 | 機械拆裝工具 | 防震捶 | 180z | 只 | 1 |
| 2 | 紫銅棒 | Φ30x200 | 只 | 1 | |
| 3 | 防震橡皮錘 | 180z | 只 | 1 | |
| 4 | 手動黃油槍 | 400cc | 只 | 1 | |
| 5 | 螺紋護套安裝工具 | 常規(guī) | 只 | 1 | |
| 6 | 螺紋護套安裝工具 | 常規(guī) | 只 | 1 | |
| 7 | 塞尺 | 100 | 件 | 1 | |
| 8 | 十字螺絲刀(小) | 常規(guī) | 套 | 1 | |
| 9 | 一字螺絲刀(小) | 常規(guī) | 套 | 1 | |
| 10 | 內(nèi)六角扳手 | 1.5-10mm | 套 | 1 | |
| 11 | 接線端子 | 7P | 批 | 1 | |
| 12 | 工具箱 | 508X248X249 | 個 | 1 | |
| 13 | 活動扳手 | 常規(guī) | 個 | 1 | |
| 14 | 壓線鉗 | 冷壓端子鉗 | 把 | 1 | |
| 15 | 壓線鉗 | 普通 | 把 | 1 | |
| 16 | 剪刀 | 常規(guī) | 把 | 1 | |
| 17 | 尖嘴鉗 | 常規(guī) | 把 | 1 | |
| 18 | 加長扳手 | 2.5-4mm | 套 | 1 | |
| 19 | 退針器 | 常規(guī) | 個 | 1 |
|